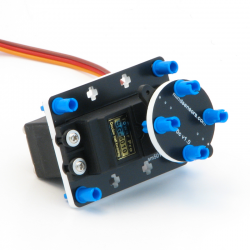
Ever thought of tentacles for your robot? Here they are! NXTSumoEyes-v2 is designed to be those tentacles, to detect objects upto 12"(30cm). This sensor is capable of detecting obstacles on front-left, front-right or straight ahead.
Detect obstacles in front-left, front-right or straight ahead
Analog Sensor interface
Supports two distance ranges
- short range for objects upto 6 inches.
- long range for objects upto 12 inches.
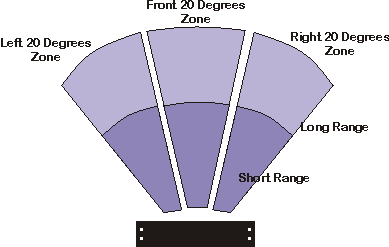
SumoEyes View Zone
IR beam on the Left and Right side of IR led spans as shown in adjacent figure. The Short range zone is about 6 inches (15 cm), and Long Range zone is about 12 inches (about 30 cm).